{kind=link}
Abstract
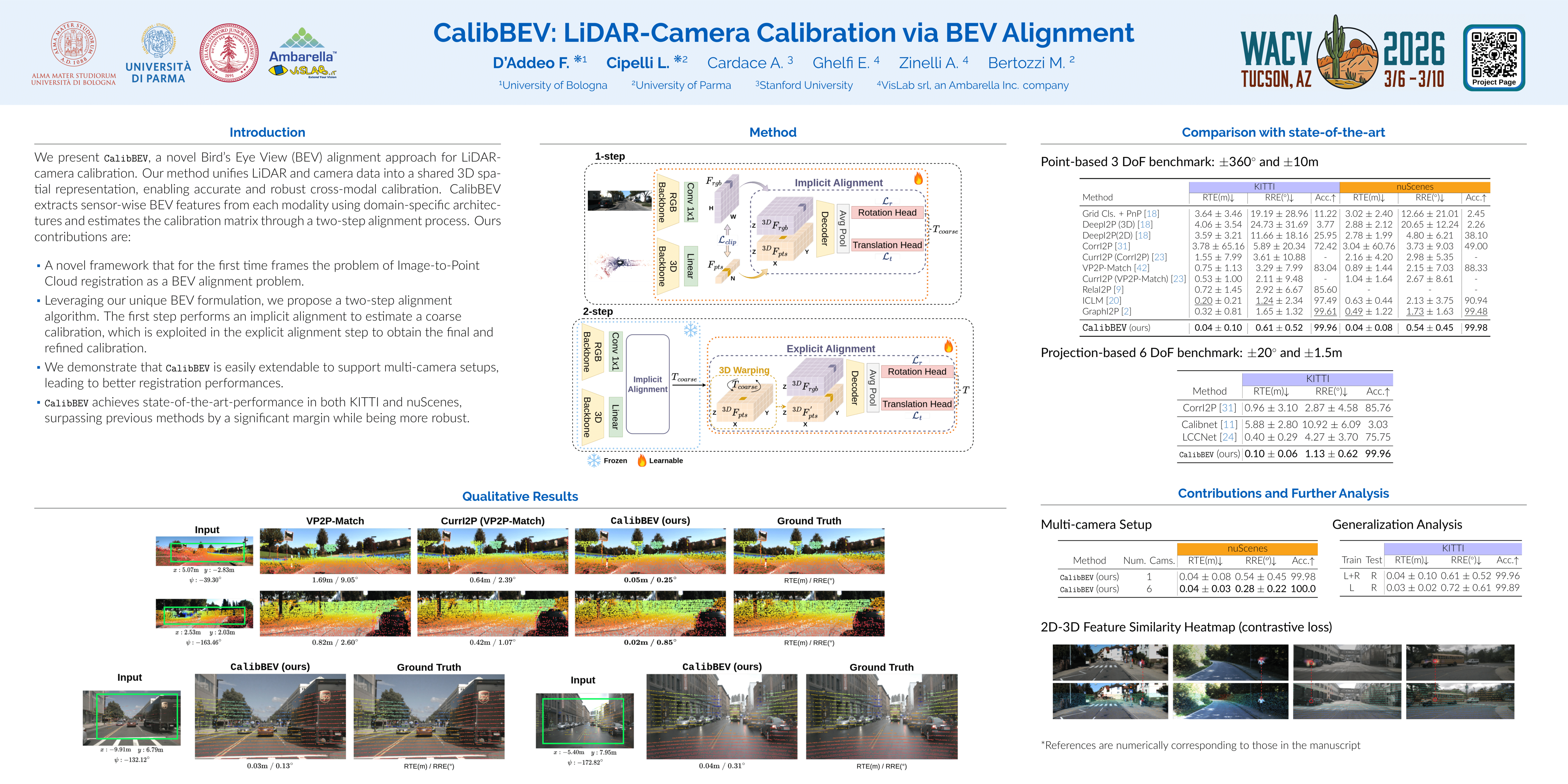
We present CalibBEV, a novel Bird's Eye View (BEV) alignment approach for LiDAR-camera calibration. Our method unifies LiDAR and camera data into a shared 3D spatial representation, enabling accurate and robust cross- modal calibration. CalibBEV extracts sensor-wise BEV features from each modality using domain-specific architectures and estimates the calibration matrix through a two- step alignment process.
Method
First, we perform an implicit alignment by regressing a coarse calibration matrix directly from the BEV features. To ease this alignment, we enforce semantic consistency between BEV representations across modalities using a contrastive loss inspired by CLIP, guiding both networks toward a unified feature space. In the second step, we leverage our BEV formulation to explicitly align the features of one modality with the other, refining the initial coarse estimate into a final, accurate calibration matrix.

Qualitative Visualization
Our method demonstrates robustness in LiDAR-camera calibration. Starting from different initial mis-calibration states, CalibBEV consistently recovers a close approximation of the true calibration matrix, showcasing the method's ability to handle various initialization conditions while achieving accurate and reliable calibration results.
The initial mis-calibration for (A) is 10°, for (B) is 25°, for (C) is 50° and for (D) is 100° around the Yaw axis.
Project Presentation
Check out our WACV project presentation on YouTube.
News
- 🎉 22/01/2026 - CalibBEV has been selected as Oral presentation at WACV 2026
- 🎉 9/5/2025 - CalibBEV has been accepted in Round 1 at WACV 2026 (6.39% acceptance rate)
- 📢 7/18/2025 - CalibBEV achieves state-of-the-art-performances both on KITTI and NuScenes datasets
BibTeX
@InProceedings{calibbev_wacv2026,
author = {D'Addeo, Filippo and Cipelli, Lorenzo and Cardace, Adriano and Ghelfi, Emanuele and Zinelli, Andrea and Bertozzi, Massimo},
title = {CalibBEV: LiDAR-Camera Calibration via BEV Alignment},
booktitle = {Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision (WACV)},
month = {March},
year = {2026},
pages = {4345-4354}
}
Acknowledgements
We would like to express our sincere gratitude to Adriano Cardace, it's been a great pleasure both working and sharing ideas with you.
We are deeply gratuful to our VisLab supervisors, Emanuele Ghelfi and Andrea Zinelli, whose passion, support and discussions made a significant difference in the process of realization of this work.
Finally, we would like to thank Massimo Bertozzi for his valuable support.